Images in /public/LAR Projects/RobotNavigation/2017_FilipeSilva/Dissertação/Tese_UA/Imagens
Click thumbnails for full image size. Click here for directory listing.
Capturar1

Capturar2

Capturar3

app

arduino_nano

arduino_uno

carlos

demo
dirtree

enc

enc_mount

enc_net
enc_quadra

encoder

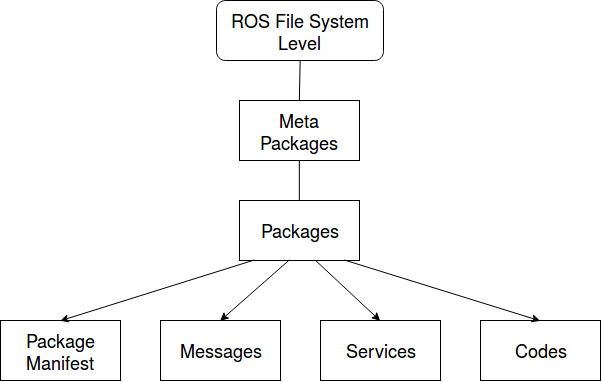
filesystem
filesystem2

final

find

fs

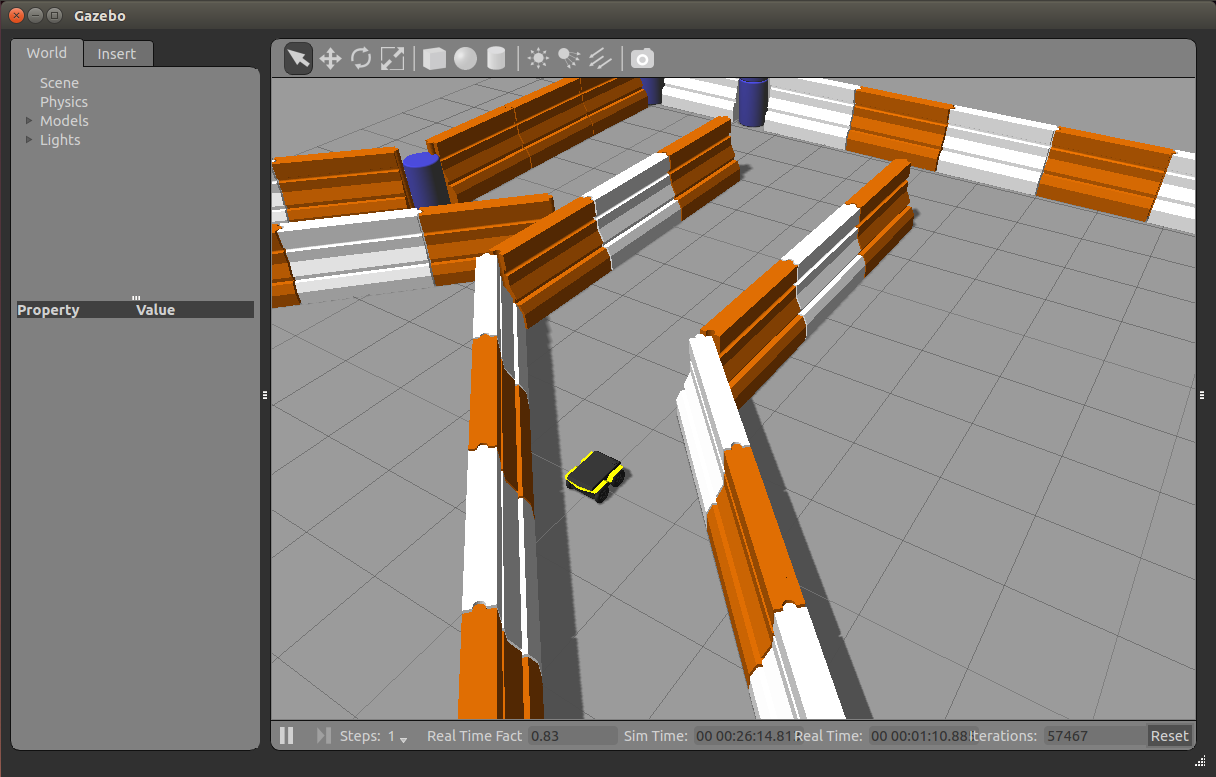
gazebo

gazebosim

geral
graph

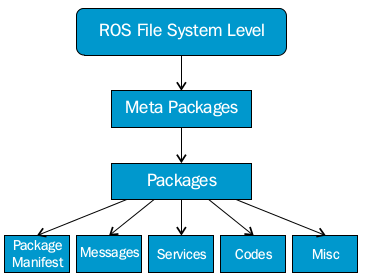
graph_level

guardian

hmm

husky

image

linefinal

linerviz

motor

nardo

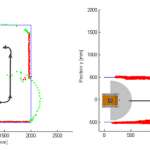
nardorviz
nardosensor

nardosim

netrpi
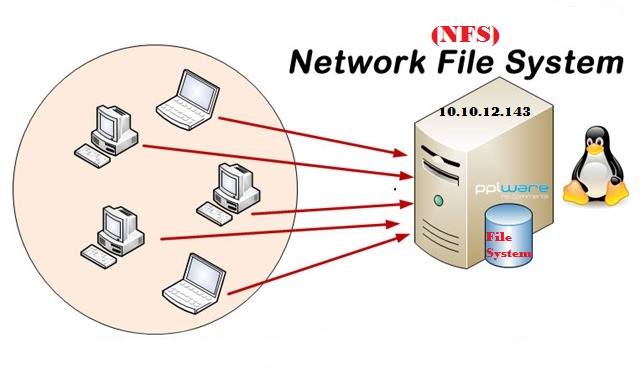
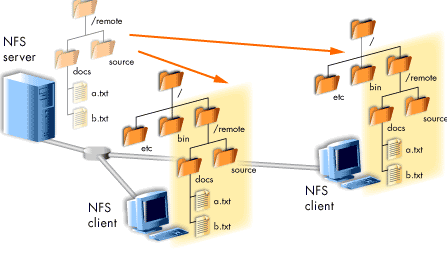
nfs
nfs
nfs

nice

p3at

pidarduino

pioneer
pista

plat1

rasp_pi

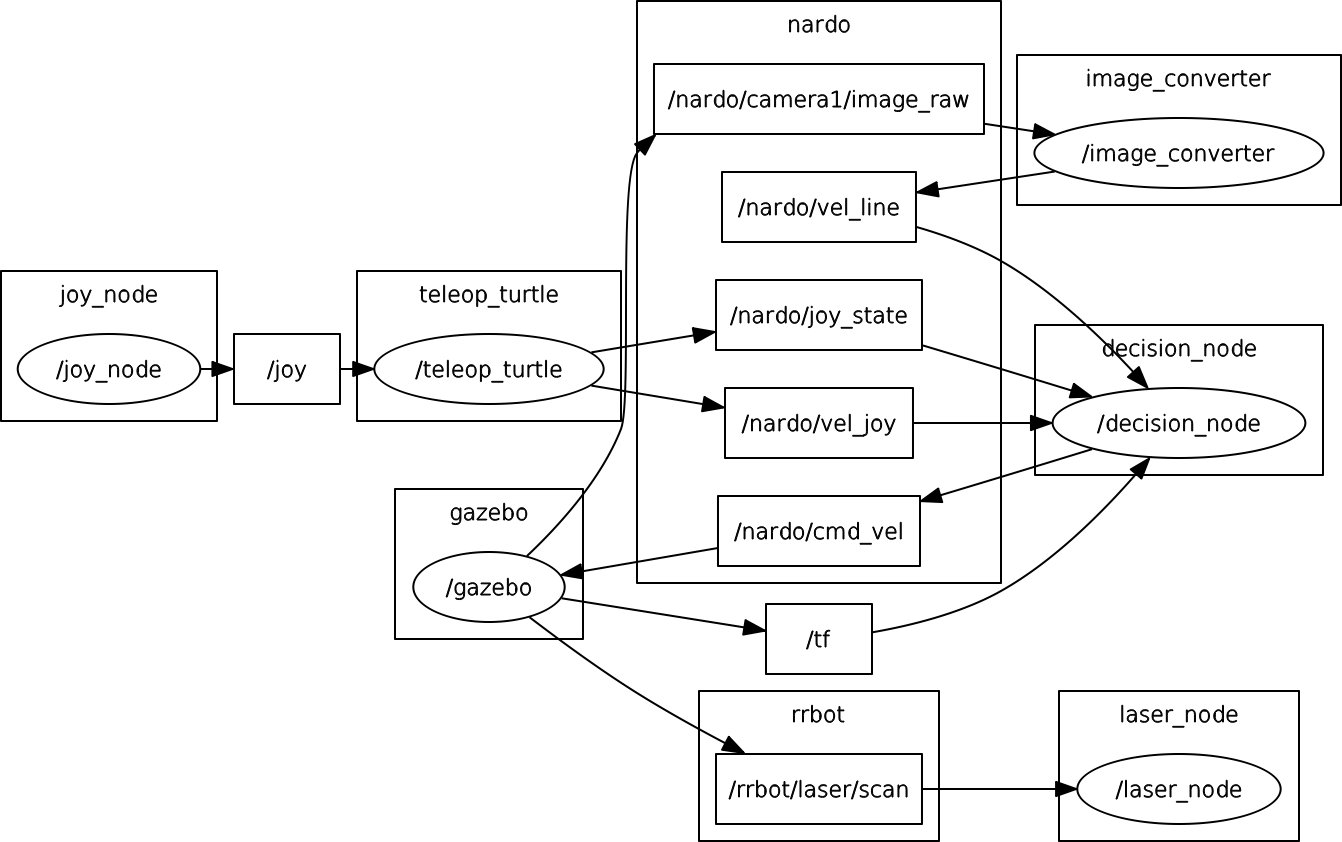
rosgraph

rosnet

rosnet2
rosserial

rosserial2
rviz1

rviz2
simgraph

sistema

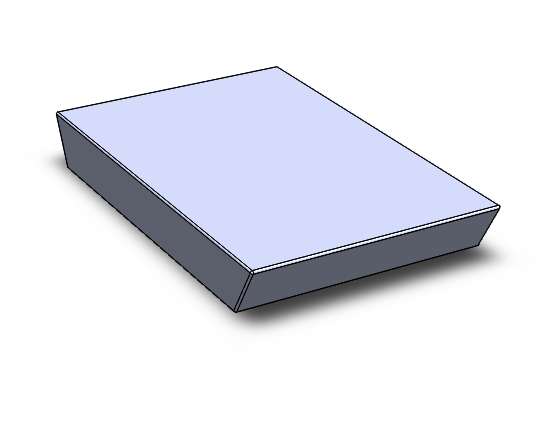
sketchup

ssmr

switch

trans

transmicao
traxbot

traxbot2
traxbot3

urdf2
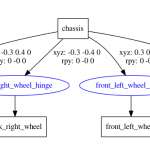
urdfgraph

vinbot

xbox
xbox
 Capturar1
Capturar1
 Capturar2
Capturar2
 Capturar3
Capturar3
 app
app
 arduino_nano
arduino_nano
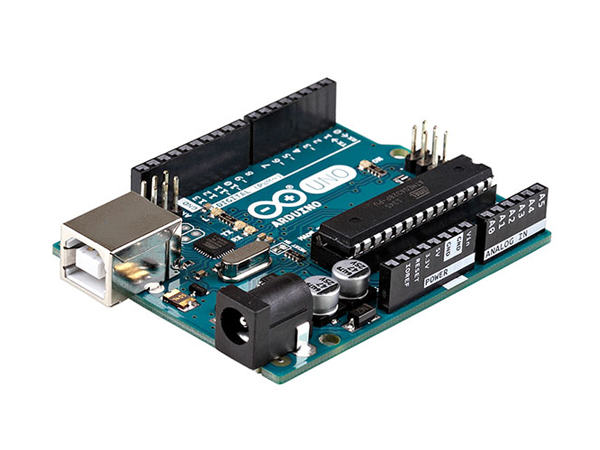 arduino_uno
arduino_uno
 carlos
carlos
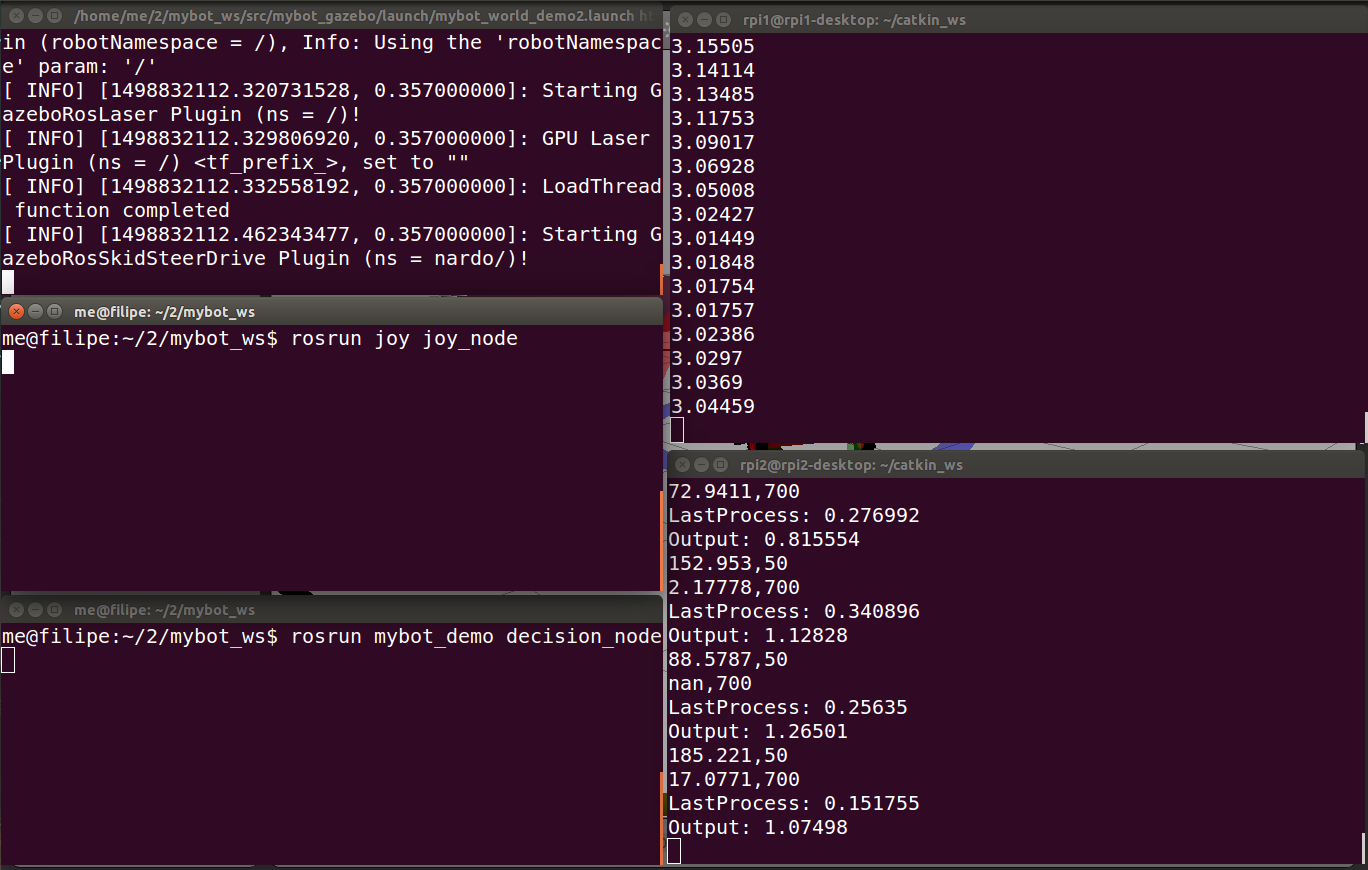 demo
demo
 dirtree
dirtree
 enc
enc
 enc_mount
enc_mount
 enc_net
enc_net
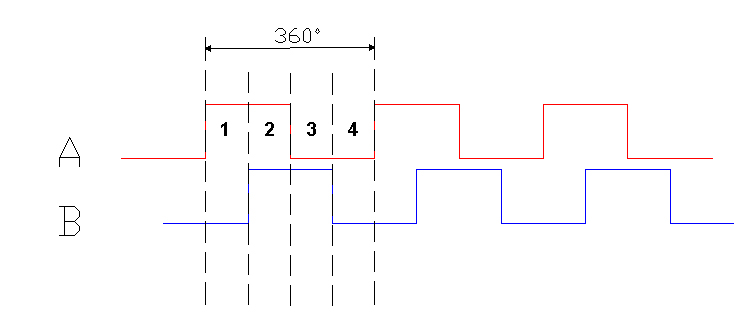 enc_quadra
enc_quadra
 encoder
encoder
 filesystem
filesystem
 filesystem2
filesystem2
 final
final
 find
find
 fs
fs
 gazebo
gazebo
 gazebosim
gazebosim
 geral
geral
 graph
graph
 graph_level
graph_level
 guardian
guardian
 hmm
hmm
 husky
husky
 image
image
 linefinal
linefinal
 linerviz
linerviz
 motor
motor
 nardo
nardo
 nardorviz
nardorviz
 nardosensor
nardosensor
 nardosim
nardosim
 netrpi
netrpi
 nfs
nfs
 nfs
nfs
 nfs
nfs
 nice
nice
 p3at
p3at
 pidarduino
pidarduino
 pioneer
pioneer
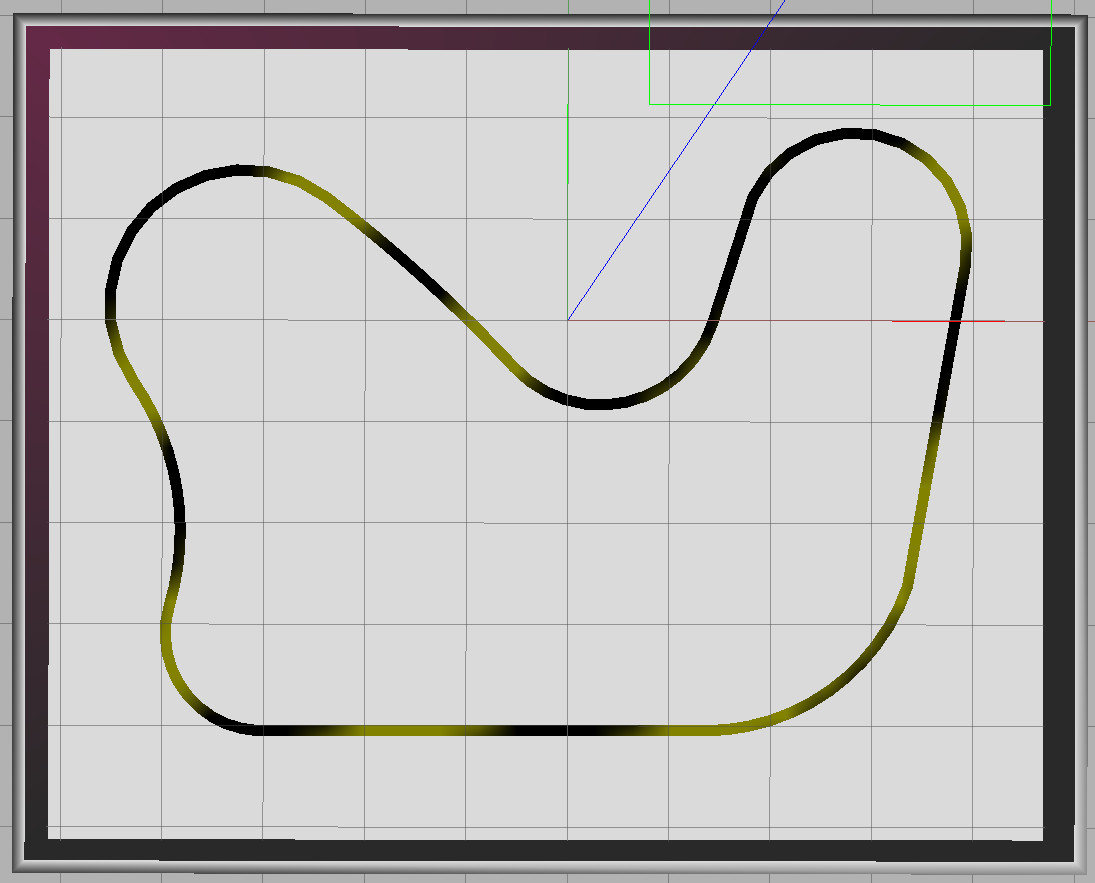 pista
pista
 plat1
plat1
 rasp_pi
rasp_pi
 rosgraph
rosgraph
 rosnet
rosnet
 rosnet2
rosnet2
 rosserial
rosserial
 rosserial2
rosserial2
 rviz1
rviz1
 rviz2
rviz2
 simgraph
simgraph
 sistema
sistema
 sketchup
sketchup
 ssmr
ssmr
 switch
switch
 traxbot
traxbot
 traxbot2
traxbot2
 traxbot3
traxbot3
 urdf2
urdf2
 urdfgraph
urdfgraph
 vinbot
vinbot
 xbox
xbox
 xbox
xbox